ROS记录
基本操作
ros需要等待初始化完成,否则直接在话题上发布可能导致接受不到
urdf
通过SolidWorks插件导出的URDF文件,它默认使用的碰撞检测模型和可视化模型是一样的。为了提高运动规划的执行速度,你可以使用MeshLab来简化模型(.stl或.dae零件)的点和面。check_urdf test.urdf //检查模型 urdf_to_graphiz test.urdf //创建pdf文件,说明关节信息,方便查看 roslaunch urdf_tutorial display.launch model:=<RELATIVE_PATH_TO_URDF> // rviz中查看urdf模型查看tf
rosrun tf view_frames evince frames.pdf rosrun tf tf_echo [reference_frame] [target_frame] rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz环境变量
env |grep ROS参数服务器
指定参数类型std::string s; n.param<std::string>("my_param", s, "default_value"); //有时编译器需要字符串类型的提示- solidworks导出urdf
通过SolidWorks插件导出的URDF文件,它默认使用的碰撞检测模型和可视化模型是一样的。为了提高运动规划的执行速度,你可以使用MeshLab来简化模型(.stl或.dae零件)的点和面。
私有名称
NodeHandle创建时有自己的命名空间,访问私有名称
ros::init(argc, argv, "my_node_name");
ros::NodeHandle nh1("~"); // 命名空间/my_node_name
ros::NodeHandle nh2("~foo"); // 命名空间/my_node_name/foo
// 可以把这两行换成下面的
ros::NodeHandle nh;
nh.getParam("~name", ... );
ros::NodeHandle nh("~");
nh.getParam("name", ... ); // /my_node_name/name
常用参数设置
getParam()
param()
setParam()
deleteParam()
hasParam()
searchParam()
// 有时需要提示类型
n.param<std::string>("my_param", s, "default_value");
如果参数服务器存在/a/b的参数,你的NodeHandle在/a/c工作空间,searchParam()搜索b会得到/a/b.
如果/a/c/b参数增加,搜索就会得到/a/c/b参数。
设置消息级别
源代码加入
#define ROSCONSOLE_MIN_SEVERITY ROSSONSOLE_SEVERITY_ERROR //error等级CmakeLists.txt
add_definition(-ROSCONSOLE_MIN_SEVERITY = ROSSONSOLE_SEVERITY_ERROR)配置文件内容 比较灵活 不需要重新编译
log4j.logger.ros.package_name=ERROR <env name="ROSCONSOLE_CONFIG_FILE" value = "$(find package_name)/config/xxx.config" />命名的消息可以单独设置日志级别 名字可以是一个模块或者其他
ROS_INFO_STREAM_NAMED("named_msg", "my message"); log4j.logger.ros.package_name.named_msg=ERROR按条件显示消息和过滤
ROS_INFO_STREAM_COND(val<0, "my message"); ROS_INFO_STREAM_FILTER() #暂时用不到 待补充显示消息的方式 单次 可调(频率) 组合
ROS_INFO_STREAM_ONCE("my message"); ROS_INFO_STREAM_THROTTLE(2, "my message"); //每隔两秒输出rqt_console rqt_logger_level 运行时修改级别
检测功能包所有原件潜在问题,出现异常情况 roswtf
roscd package_name roswtf消息记录
rosbag record -a #记录所有 <node pkg="rosbag" type="record" name="bag_record" args="/topic_name" /> #消息记录包默认在~/.ros路劲下 除非使用-o(前缀) -O(文件命名) rosbag play xxx.bag
节点生命周期
- 当第一个ros::NodeHandle创建时候,会调用ros::start()
- 最后一个ros::NodeHandle销毁时,会调用 ros::shutdown() (这将关闭所有打开的订阅、发布、服务调用和服务服务器)
遇到的问题
remap 重映射
这个坑了我好久
作用范围:范围内随后的所有声明(
重命名已经存在的话题
<!-- 已经存在话题moveit_group/joint_states move_group需要订阅joint_states--> <launch> <node pkg="catch_control" type="joint_state_maintain_node" name="joined_joint_state_publisher" respawn="true" output="screen"> <remap from="moveit_group/joint_states" to="joint_states"/> </node> </launch>将别的话题映射到自己的订阅的主题上
特别要注意这种方式的使用 作用范围很大<!-- 已经存在话题moveit_group/joint_states move_group需要订阅joint_states--> <launch> <remap from="joint_states" to="moveit_group/joint_states"/> <include file="$(find UR5e_robotiq_moveit_config)/launch/move_group.launch" /> </launch>这种方式还是出现了下面问题 但是用第一种结合异步更新没有出现
Failed to fetch current robot state
Didn’t received robot state (joint angles) with recent timestamp within 1 seconds.
Check clock synchronization if your are running ROS across multiple machines!
简单理解:remap就是把作用范围内的名称直接替换掉 用替换掉的名称对外开放 实现两个话题通信
所有ROS节点内的资源名称都可以在节点启动时进行重映射。
命名重映射采用语法:name:=new_name
例如将chatter重映射为/wg/chatter,在节点启动时可以使用如下方式重映射命名:
rosrun rospy_tutorials talker chatter:=/wg/chatter
ROS的命名解析是在命名重映射之前发生的。所以当我们需要“foo:=bar”时,会将节点内的所有foo命名映射为bar,而如果我们重映射“/foo:=bar”时,ROS只会将全局解析为/foo的名称重映射为bar。
可以通过下表总结命名重映射与命名解析之间的关系。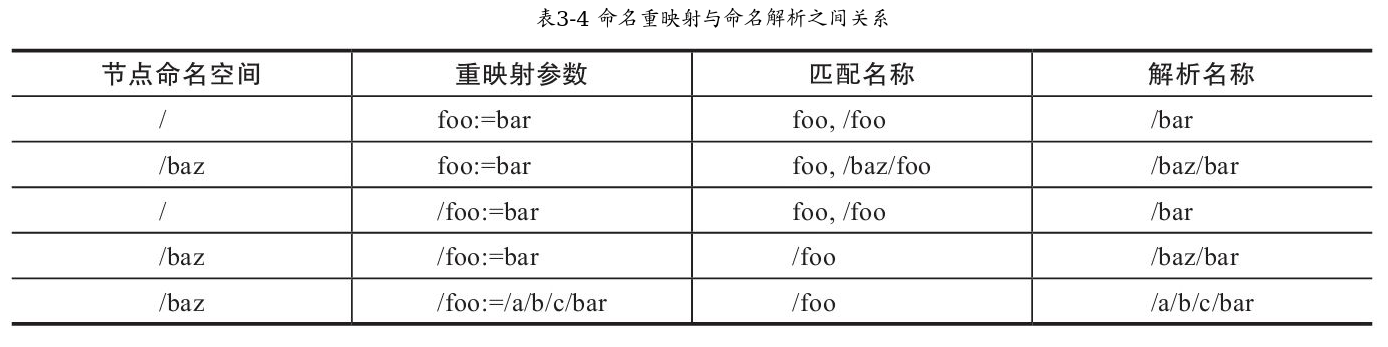
Failed to fetch current robot state
ros::AsyncSpinner async_spinner(6);
async_spinner.start();
async_spinner.stop(); #需要关闭的时候用
节点初始化时加上这句 异步处理更新回调函数 感觉可能是moveit内部节点回调函数处理
clion编译经常卡死
查看内存和cpu使用率都有盈余,后来发现是因为launch了很多节点,发布了很多数据,关闭就好了
引用
转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。可以邮件至 yangbenbo@whu.edu.cn
文章标题:ROS记录
本文作者:杨本泊
发布时间:2019-10-07, 11:32:36
最后更新:2023-07-09, 07:10:11
原始链接:http://yangbenbo.github.io/2019/10/07/ROS记录/版权声明: "署名-非商用-相同方式共享 4.0" 转载请保留原文链接及作者。