基本矩阵
基本矩阵定义1
理解复杂系统关键是找到里面的基本元素, 对应一般矩阵则是找到基本矩阵,研究基本矩阵则可以知道一般矩阵的含义
令$u,v$为$n$维实(复)列向量,若$v^Tu \ne -1$, 则$I+uv^T$为基本矩阵, 其中$uv^T \in \mathbb{R}^{n\times n}$(外积), 如果$u,v$其中有1个为零向量,则基本矩阵退化为单位矩阵
基本矩阵转置也是基本矩阵$(I+uv^T)^T=I+vu^T$, 其中$v^Tu=u^Tv\ne 1$
猜测基本矩阵的逆也是基本矩阵$(I+uv^T)^{-1}=I+kuv^T$, 则有
上式子右边等于$I$, 得到$k=-\frac{1}{(1+v^Tu)}$, 这也是需要$v^Tu\ne -1$的原因
计算基本矩阵行列式$|I=uv^T|=|I|+v^T(adjI)u=1+v^Tu$, 其中$I=\frac{adjI}{|I|}=adjI$, 其中$adjI$表示$I$的伴随矩阵
初等行变换对应基本矩阵
在高斯消去法中, 每个基本的行变换都对应1个基本矩阵,
- 交换, 行$i$于行$j$互换位置
- 伸缩, 行$i$乘非零常数$c$
- 取代, 行$i$乘非零常数$c$的结果加进行$j$, $i\ne j$
对单位矩阵进行初等行变换即为基本矩阵
例如3维基本矩阵可以归纳处基本矩阵的形态$I+uv^T$
其中, $e_i$是第$i$个标准单位向量(第$i$元=1,其余为0), 推广到$n$维矩阵如下, 并使用基本矩阵逆矩阵计算公式推导逆矩阵
- 交换, 行$i$于行$j$互换位置: $E_1=I_n-(e_i-e_j)(e_j-e_i)^T$, 计算逆矩阵得$E_1^{-1}=E_1$, 连续两次交换就是单位矩阵并没有做什么
- 伸缩, 行$i$乘非零常数$c$: $E_2(c)=I_n+(c-1)e_ie_i^{T}$, $E_2(c)^{-1}=E_c(\frac{1}{c})$
- 取代, 行$i$乘非零常数$c$的结果加进行$j$, $i\ne j$: $E_3(c)=I_n+ce_ie_j^T$, $E_3(c)^{-1}=E_3(-c)$
定理: 方阵$A$非奇异的充要条件是$A$为基本矩阵乘积
- 如果$A$非奇异,使用高斯-约当法把矩阵化简直至单位矩阵, 则$E_k\cdots E_2E_1A=I$, 得到$A=E_1^{-1}E_2^{-1}\cdots E_k^{-1}$
- 如果$A=E_1E_2\cdots E_n$, 基本矩阵非奇异, 乘积也非奇异, 因为$|A|=|E_1E_2\cdots E_n|=|E_1||E_2|\cdots |E_n|=\ne 0$
基本矩阵的几何意义2
基本矩阵的特征值
$(I+uv^T)u=(1 + v^Tu)u$, 所以$1+v^Tu$和$u$分别是特征值和特征向量.
另外考虑垂直于$v$的$n-1$子空间$\mathcal{V}$线性独立向量$x_1, x_2,\cdots, x_{n-1}$, 则有$(I+uv^T)x_i=x_i$, $1,x_i$分别为特征值和特征向量, 又有$u\notin \mathcal{V}$, 所以
其中$S=\begin{bmatrix} u& x_1& \cdots & x_{n-1}\end{bmatrix}$, 所以$|I+uv^T|=1+v^Tu$
几何意义
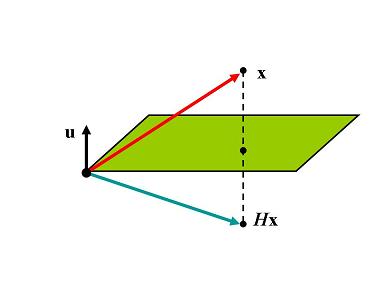
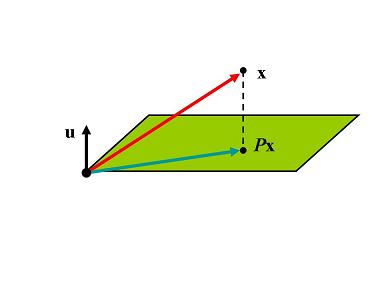
$(I+uv^T)x=x+(v^Tx)u$, 所以基本矩阵就是对输入矢量$x$进行平移$(v^Tx)u$
- 基本镜射矩阵, 令$||u||=1$, $v=-2u$, 对应$H=I-2uu^T$
- 基本投影矩阵, 令$||u||=1$, $v=-u$, 得到$P=I-uu^T$
- 基本列运算矩阵, 参考上面3个初等行变换矩阵
- 交换: $E_1=I_n-(e_i-e_j)(e_j-e_i)^T = E_1-2uu^T$, 其中$u=\frac{1}{\sqrt{2}}\frac{e_i-e_j}{||e_i-e_j||}$, 所以交换矩阵就是按照$e_i-e_j$为超镜射平面法向量的基本镜射矩阵
- 伸缩: $E_2x=x+(c-1)e_ie_i^{T}x$, 说明只是把$x_i$伸缩了$c$倍
- 取代, 行$E_3x=x+ce_ie_j^Tx$, 把向量$x$沿着$e_i$方向平移了$cx_j$单位
矩阵和的行列式3
矩阵乘积行列式比较简单$|AB|=|A||B|$, 矩阵和的行列式相对比较麻烦
- 首先证明$|A+UV^T|=|I_m+V^TA^{-1}U||A|$, 其中$A$为可逆矩阵, $B=UV^T$, 其中$U,V\in \mathcal{R}^{n\times n}$
设计分块矩阵对应求行列式得到同时设计分块矩阵求行列式证明原等式 - 对应特殊矩阵,当$m=1$时, $U=u, V=v$为$n$维列向量,则有其中$adjA$为$A$的伴随矩阵
1. https://ccjou.wordpress.com/2010/02/02/%e7%89%b9%e6%ae%8a%e7%9f%a9%e9%99%a3-%e5%8d%81%ef%bc%9a%e5%9f%ba%e6%9c%ac%e7%9f%a9%e9%99%a3/ ↩
2: https://ccjou.wordpress.com/2011/01/10/%E5%9F%BA%E6%9C%AC%E7%9F%A9%E9%99%A3%E7%9A%84%E5%B9%BE%E4%BD%95%E6%84%8F%E7%BE%A9/
3. https://ccjou.wordpress.com/2009/12/04/%e7%9f%a9%e9%99%a3%e5%92%8c%e4%b9%8b%e8%a1%8c%e5%88%97%e5%bc%8f-%e4%b8%8a/ ↩
转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。可以邮件至 yangbenbo@whu.edu.cn
文章标题:基本矩阵
本文作者:杨本泊
发布时间:2023-09-09, 09:13:58
最后更新:2023-09-10, 09:35:55
原始链接:http://yangbenbo.github.io/2023/09/09/基本矩阵/版权声明: "署名-非商用-相同方式共享 4.0" 转载请保留原文链接及作者。